今天我们来学习Grasshopper的系列教程,今天要学习的内容是:叶片网格划分
叶片网格划分:是指把点云按照参数划分成多个小的空间,让每个空间都包含若干个点

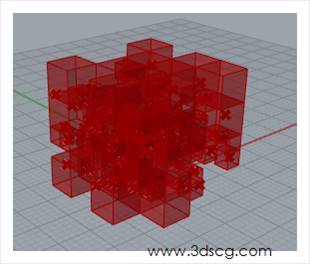
OcTree:立方体划分
把空间的点按照立方体的形式来划分,让点包含在每个单独的小空间内。
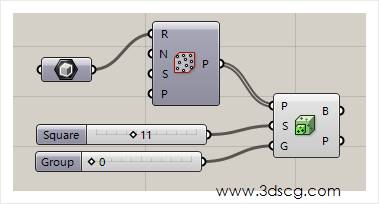
Grasshopper运算器左边的参数分别代表的是:
\1. 输入要划分空间的点云
\2. 立方体空间的大小,这个值越大,作为容器的立方体就越大
\3. 点云群体的数量,这个值越大,立方体内的点就越多,那么立方体的体积也将变大。
文字的表述可能比较枯燥,大家可以通过下面两个参数的调整来看一下立方体划分之后的效果。
点云在做空间划分后的效果如下图所示。
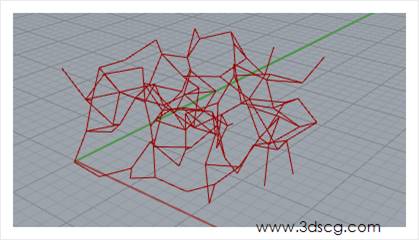
Proximity 2D:2d的点云的区域连接
这个运算器制作的效果会比较酷炫,参数也比较复杂,大家可以先看看效果图,再来学习参数。
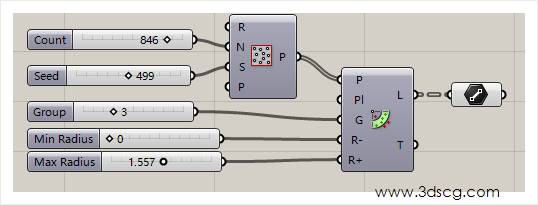
Grasshopper运算器左边的参数分别代表的是:
\1. 输入2d的点云
\2. 点云的参考平面
\3. 点云内部点的相互连接的点的个数,这个参数大家要好好理解一下,所谓内部点相互连接点的个数指的是:
o 内部的任意一个点和其他点相互连接的个数,比如说内部有个点叫点a,那么这个值等于3的话,那点a只会跟最近的三个点进行连接,如果这个值等于100的话,那么点a会跟最近的100个点进行连接,
\4. 点之间相互连接的下限值
\5. 点之间相互连接的上限值,通过这个值的设定,我们可以让这个点只连接它周围的点。
2d的点云的区域连接

Pr○ xml ty3D:3d点云的区域连接
这个是上一个运算器的3d版本,参数各方面都是类似的,这里就不多加描述了,大家通过下面的参数的调整也可以很轻松的看到其变化。

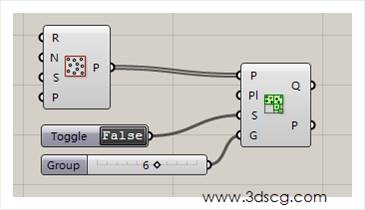
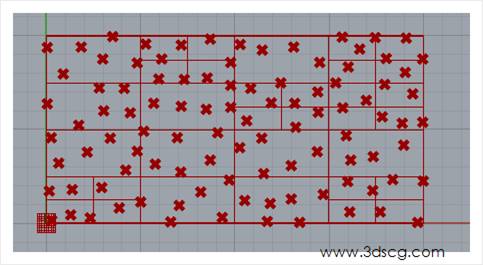
QuadTree:二维的点区域划分
这个是上面那个立体划分的二维版本,他们的参数也是类似的,大家可以通过参数的调整观察其变化。
其中下方的案例图例当中有个Toggle运算器是用与切换矩形和正方形的形态的,大家双击这个运算器就可以看到效果的。